به گزارش گیزمگ، ترافیک، یکی از خستهکنندهترین مشکلات زندگی شهری است. با این که برخی شرکتها وعده دادهاند در آینده تردد با تاکسیهای پرنده ممکن خواهد شد، شهرهایی مانند آمستردام، به فکر جایگزینهای بهتری هستند.
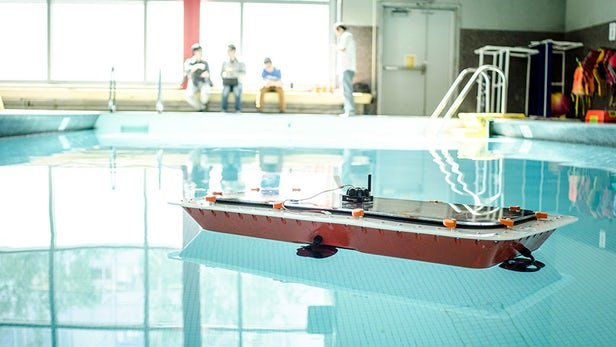
به گزارش اقتصادآنلاین به نقل از ایسنا، برنامه پروژه "روبوت" (RoBoat)، استفاده از قایقهای خودران در کانالهای آبی برای رساندن مسافران و خدمه به مقصد، ملحق کردن قایقها به یکدیگر برای تشکیل ساختارهای شناور موقت و بررسی محیط است. این برنامه طوری طراحی شده که قایقها، هوشمندتر و چابکتر شده و ساخت آنها سادهتر باشد.
اجرای این پروژه، با همکاری دانشگاه "امآیتی" (MIT) و "موسسه آمستردام" صورت میگیرد.
هدف از انجام پروژه روبوت، استفاده از قایقهای خودکار به جای تاکسی، وانت و کامیونهای حمل زباله است تا ازدحام خیابانهای شلوغ، کاهش یابد. حتی، انجام بعضی از این خدمات شهری در شب میتواند به پاکسازی بیشتر جادهها کمک کند.
"دنیل راس" (Daniela Rus)، از نویسندگان این پژوهش میگوید: تصور کنید همه این خدمات زیرساختی که معمولا در طول روز صورت میگیرند، در نیمه شب و روی آب به کار روند.
پژوهشگران این پروژه، قایقهای هوشمند کوچکی را ابداع کردهاند که به تعدای حسگر و لوازم الکتریکی مجهز هستند. آنها به این قایقها، توانایی محلق شدن به یکدیگر را دادهاند تا ساختارهای شناور موقتی مانند پلها یا حتی پلتفرمهایی برای کنسرتها و فروشگاهها بسازند. نخستین نمونه این قایقها در سال 2016 ارائه و به مسیری در کانال آمستردام فرستاده شد.
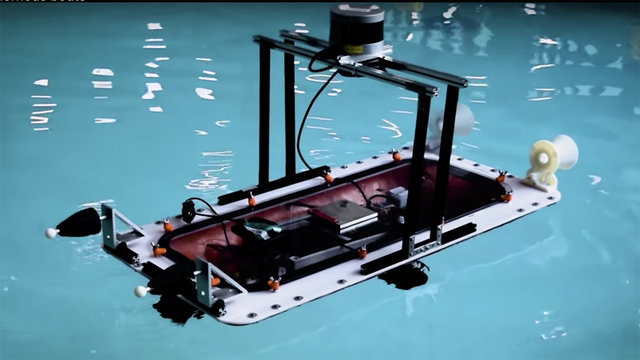
اکنون، این گروه پژوهشی، طراحی قایق ها را بهبود بخشیده و ساخت قایقها با استفاده از چاپ سهبعدی بدنه کشتی، سادهتر شده است. این کار، با استفاده از چاپگر تجاری، 60 ساعت زمان برد. این چاپگر، 16 قطعه تولید کرد که پس از تولید، به یکدیگر ملحق و با چندین لایه پشمشیشه مهر و موم شدند تا بدنه قایق را شکل دهند.
هرکدام از قایقها، حامل یک منبع انرژی، آنتن وایفای، "سیستم تعیین موقعیت" (GPS)، یک "واحد اندازهگیری درونی" (IMU)، یک رایانهٔ کوچک و یک ریزکنترلگر هستند. واحدهای سیستم تعیین موقعیت میتوانند موقعیت بیرونی را مشخص کنند و ردیابی داخلی هم با استفاده از سیستم بیسیم مافوق صدا انجام میشود.
پژوهشگران برای چابکی قایقها، پرههایی در مرکز هر چهار گوشه آنها گذاشتند. این کار، امکان حرکت آسان به جلو و عقب را فراهم میکند. نکته دیگر در ساخت این قایقها، الگوریتم راندن آنهاست که برای استفاده از عواملی مانند نیروی گریز از مرکز، کشش و تغییر جرم طراحی شده است.
"وی وانگ" (Wei Wang)، نویسنده ارشد این پژوهش میگوید: کنترلکننده، پویایی قایق، موقعیت کنونی آن، محدودیتهای رانندگی و موقعیت مقصد را برای چند ثانیه بعد در نظر میگیرد تا راندن قایق را در مسیر مورد نظر بهبود بخشد.
پژوهشگران، برای اطمینان از عملکرد الگوریتم های جدید کنترل، نخستین نمونه قایق را در مسیرهای مشخص، آزمایش کردند. پس از انجام 10 آزمایش، اشتباهات ردیابی قایق از آنچه انتظار میرفت، کمتر شد.
بررسیهای آینده این قایقها، در مواجهه با امواج، جریان آب و تعداد بسیاری از مسافران و خدمه انجام خواهند شد.
مقاله این پژوهش، این هفته در کنفرانس بینالمللی " IEEE" ارائه میشود.